自動運転車(AV)はセンサーによって成り立っています。カメラ、LiDAR、レーダーは車両の“目と耳”として機能し、環境理解のために必要なデータを認識システムへ提供します。もしセンサーが誤作動したり、車載ソフトウェアがそれを誤解したりすれば、安全性が危険にさらされます。センサー性能やセンサーデータの(機能)安全性を現実世界のテストだけで保証するのはコストが非常に高くつきます。だからこそ、高忠実度なセンサーシミュレーションはもはや“オプション”ではありません。AV/ADAS システムを検証するための業界標準となっています。
センサーシミュレーションが不可欠な理由
長年、自動車業界は実走行テストにほぼ全面的に依存してきました。多様な天候、光、交通状況を収集するために、冬のテストにはドイツからフィンランド、またはデトロイトからカナダへ、暑い天候のてすとにはスペインやアリゾナへと何台もの車両が走行を行いました。この方法は、時間がかかり、費用が高く、不完全です。重要なシナリオの多くは発生頻度が低く、テスト車両では十分に収集できないこともあります。
この問題は、Tesla や Wayve が取り組むようなエンドツーエンド AI モデルの普及に伴いさらに大きくなっています。こうしたモデルはコンポーネントごとに検証することができず、センサーを含むフルスタックでのトレーニングとテストが必要になります。コストと開発期間を現実的に保つには、トレーニングとテストの大部分をシミュレーションに移行する必要があります。
従来のトレーニング/テストデータの限界
現実の走行データには多くの隠れた非効率性が伴います。
- センサーの種類や取付位置が変わると、それまでのデータが無効になる
- “LiDAR をルーフに載せる?” “バンパーに隠す?” といった議論が根拠不足で停滞
- 変更のたびに同様の高コストの走行距離を再収集する必要がある
一方、シミュレーションであれば 同じシナリオを新しい条件で即座に再実行 できます。これは開発スピードを加速させ、設計上のトレードオフを迅速に解決するために極めて重要です。
センサーシミュレーションの優位性
高忠実度センサーシミュレーションは実走行では不可能な優位性を提供します:
- 早期検証:フロントエンド設計が固まる前に仮想センサー配置を検証
- テスト再利用:センサー構成が変わっても同じシナリオで再テスト可能
- 設計の柔軟性:取付位置をバーチャルに比較して技術・デザイン要件の両立を支援
- スケーラビリティ:低コストで圧倒的なテスト量を実現し、開発期間を短縮
最も重要なのは、センサーシミュレーションは単なる代替手段ではなく、現代の開発に必要なスピードと規模を唯一実現できる方法だということです。
センサー毎の相違(シミュレーションを困難にする要因)
各センサーは全く異なる動作特性を持ち、それがシミュレーションの難しさにつながります。
カメラ
- 比較的シミュレーションしやすいが、リアリズムと計算性能が鍵
- 眩光、霧、雨、反射などを“自然に”表現しなければ CV モデルは騙せない
LiDAR
- 時間 flight / FMCW により高密度点群を生成
- ノイズ・雨雪・波長依存の挙動の忠実再現が必要
レーダー
- 最も複雑
- ガードレール、濡れた路面、壁による多重反射が“ゴーストターゲット”を生成
- これが追跡アルゴリズムを混乱させる
- 高忠実度レーダーシミュレーションには極めて深いセンサーモデルが必要
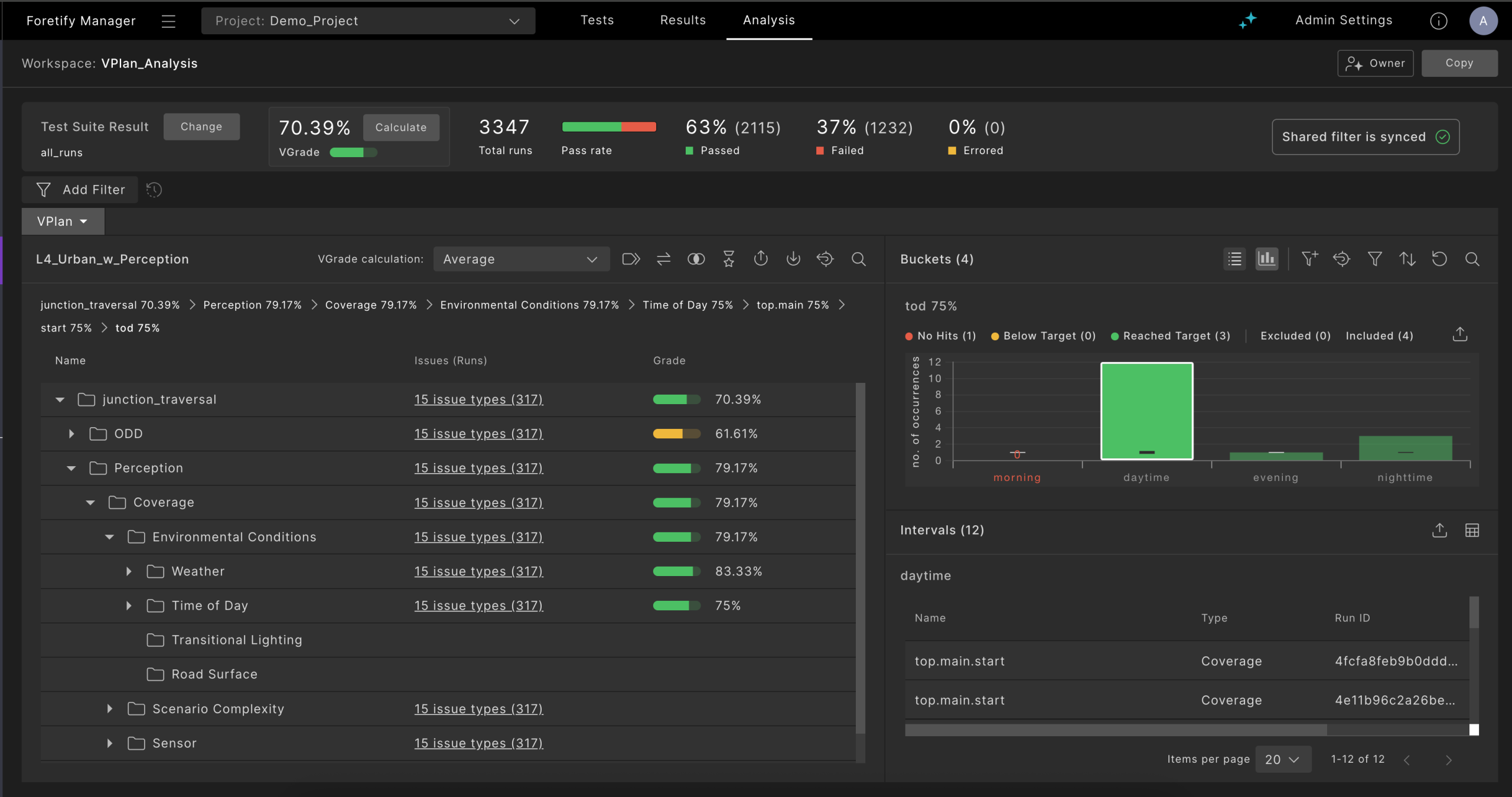
Foretellix + NVIDIA:完全なツールチェーン
Foretellix の Foretify プラットフォームは、AI 駆動 AV スタックのトレーニング・検証・安全性評価のための Physical AI ツールチェーン です。
- Foretify Generate:ODD をまたぐエッジケースを含む大規模な合成データ生成
- Foretify Evaluate:現実世界の走行データとシミュレーション結果を統合し、カバレッジギャップを特定
さらに:
- NVIDIA Omniverse、NuRec、Cosmos と統合
→ カメラ、LiDAR、レーダーの高忠実度センサーモデル
→ ログ走行データの“神経再構成(neural reconstruction)”により
編集・再利用可能な仮想シーンへ変換
→ 天候、周囲車両、センサー配置などを変化させて再シミュレーション可能
これらを組み合わせることで、AV 開発者は トレーニングとテストを統合したデータ駆動型開発 を実現できます。
今後の展望
センサーシミュレーションはまだ普及初期ですが、
5 年以内にすべての自動車メーカーが日常的に利用するようになる と予測されます。
忠実度も急速に向上しており、多くのエッジケースが既にシミュレーション可能です。物理走行が完全になくなることはありませんが、訓練と検証の大部分は仮想空間へ移行するでしょう。
コスト圧力の増大、開発期間の短縮、エンドツーエンド AI への移行を背景に、
高忠実度センサーシミュレーションは不可欠な技術 となりました。
著者について
Sebastian Klaas – Foretellix プロダクトマネジメントディレクター
Audi、Luminar、Samsung Semiconductor にて上級技術職を歴任。
KIT(カールスルーエ工科大学)でコンピュータサイエンスを専攻。