
エグゼクティブサマリー
開発コストの高騰と長期化するバリデーションサイクルに直面したレベル4自動運転車(AV)企業は、実走行に加えてシミュレーションを導入し、テスト戦略を近代化しました。従来は物理テストに大きく依存していましたが、この方法では先進的なAVプログラムに必要な複雑さ、安全性要件、スピードに対応できなくなっていました。
そこでチームはシナリオベースのシミュレーションとデジタルツインを開発ワークフロー全体(CI/CDを含む)に組み込み、シミュレーション主導の戦略を採用しました。これは実走行テストを置き換えるのではなく補完し、より早く、迅速に、そして制御された形でのバリデーションを可能にしました。これにより、AV開発者と検証と妥当性確認(V&V)エンジニアは早期に問題を発見し、素早く対応し、後工程の物理テストへの依存を軽減できました。
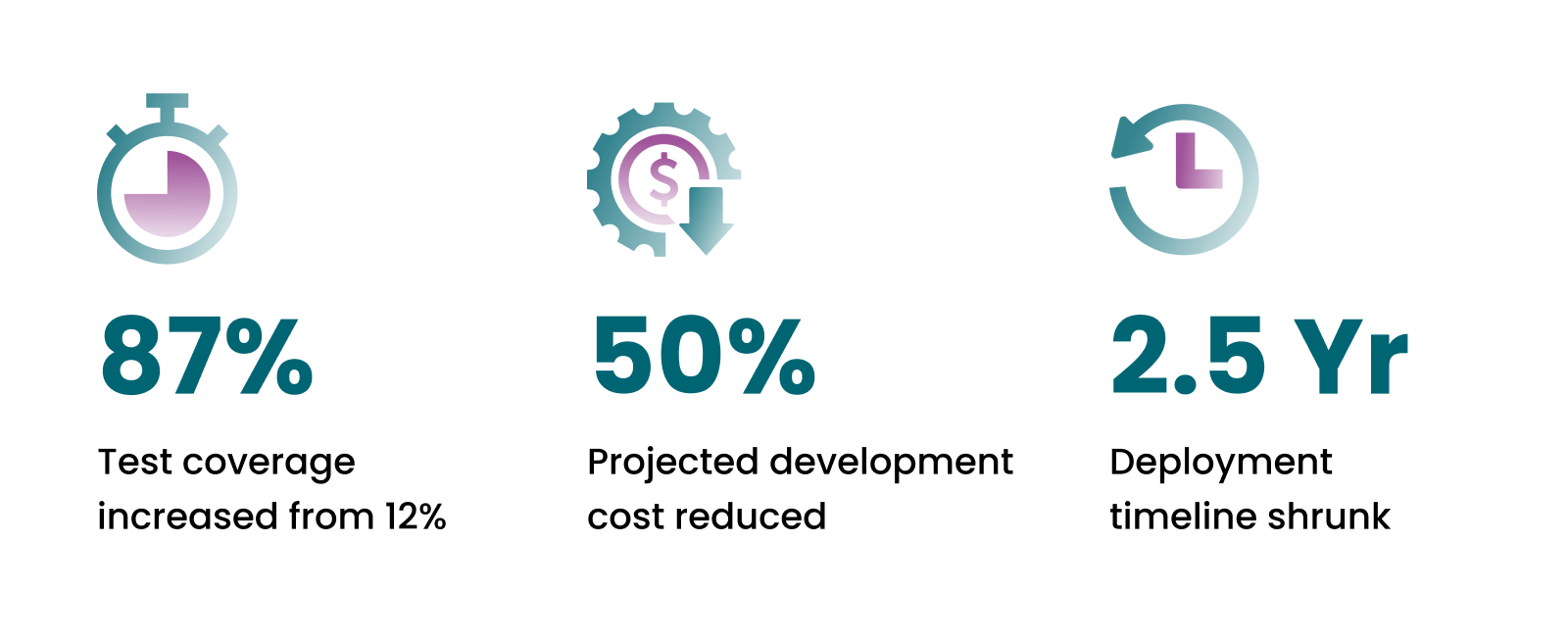
Foretellixの開発ツールチェーンを活用することで、この企業はテストの多くをテストトラックから仮想環境へと移行し、ソフトウェアライフサイクル全体を通じた継続的で高カバレッジのバリデーションを実現しました。その結果:
- テストカバレッジは12%から87%へ増加
- 開発コストは50%削減
- 想定開発期間は4.5年から2年未満へ短縮
なぜ従来のテストはスケールしなくなったのか
高度な自動化レベルに進むにつれ、物理テストは依然として重要です。特にセーフティドライバーを外す前段階の制御されたデプロイメントにおいては不可欠です。しかし開発段階で物理テストのみに頼ることは非現実的になっています。
物理テストは高コストで時間がかかり、カバー範囲も限定的です。大規模にエッジケースを再現することはほぼ不可能で、フィードバックサイクルが長いため問題解決が遅れ、開発全体のスピードを阻害します。レベル4システムを構築する企業にとって、これは重大な財務的・運用的ボトルネックとなります。
行動しない代償は明白です:開発期間の長期化、増大するバリデーション予算、セーフティクリティカルなシステムに未検証の挙動を導入するリスク等があげられます。
このケーススタディでは、レベル4 AV開発企業がいかにしてその悪循環を断ち切ったのかを示します。
チャレンジ
このレベル4 AV開発チームは、多くのプログラムに共通する問題に直面していました。優れたエンジニアチームと成熟したソフトウェア開発プロセスを持ちながらも、物理テストへの過度な依存により制約を受けていました。その結果、イテレーションが長期化し、実世界のエッジケースのカバレッジが不足し、システムの複雑化に伴ってコストも増大していました。
新しいソフトウェアバージョンごとに大規模なリグレッションテストが必要でしたが、バリデーションはコードが統合・デプロイ準備段階に入ってからしか行えませんでした。その時点で問題を修正するには大幅な再作業が必要となり、開発者はタイムリーなフィードバックを得られず、V&Vチームは更新頻度に追いつけませんでした。
シミュレーションはすでにツールキットに存在していましたが、開発ワークフローと統合されていませんでした。開発者が高価値シナリオでコードを容易にテストできるプロセスがなく、早期にシステム挙動を確認できないため、バグが蓄積し開発は停滞しました。
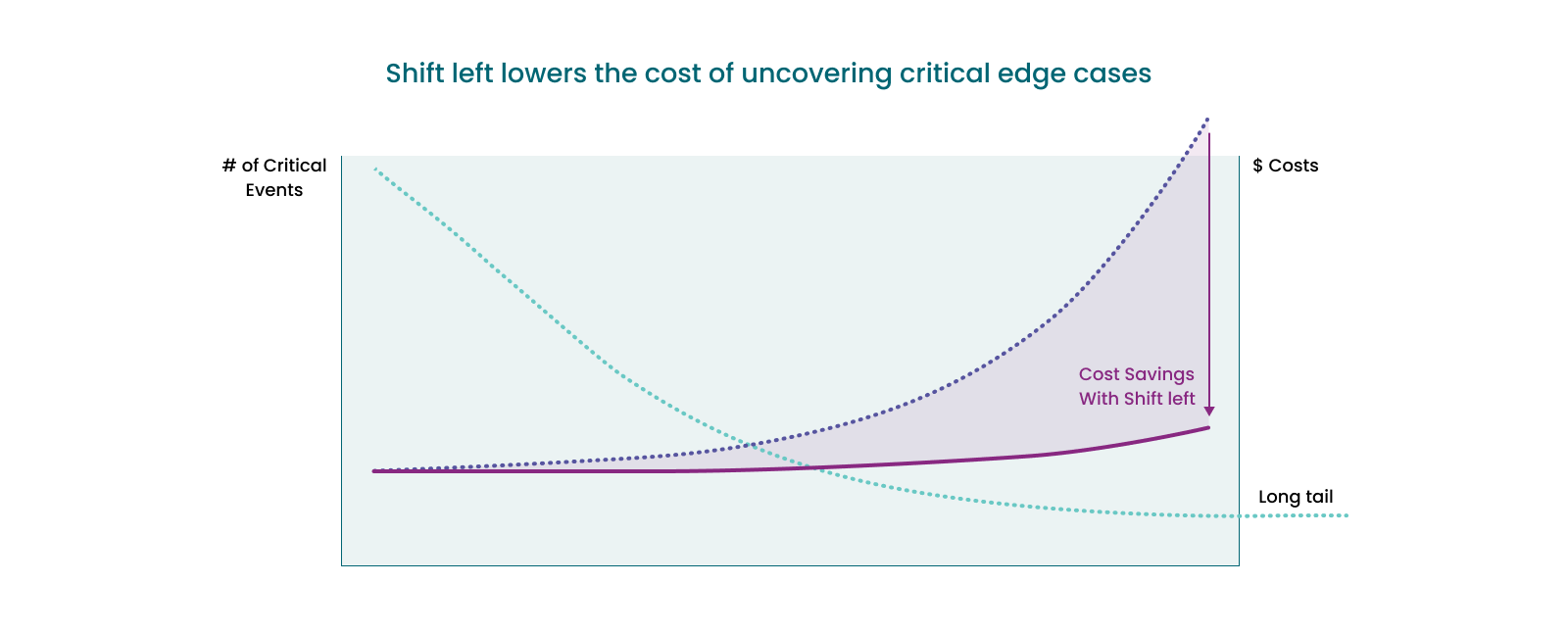
開発初期段階へのシミュレーションの導入
問題解決のため、チームは「Shift-Left」戦略を採用しました。ソフトウェアが複数の統合段階を経るのを待つのではなく、シナリオベースのテストをCI/CDパイプラインに直接統合しました。開発者は継続的に変更を検証し、テストトラックに到達する前に問題を発見できるようになりました。
戦略の中心となったのはデジタルツインです。高精度モデルが仮想環境で車両挙動と環境動態を再現し、開発ワークフローに埋め込まれることで、シミュレーションが日々の設計判断を支える強力なフィードバックループを形成しました。
この結果、開発者もV&Vエンジニアも恩恵を受けました。開発者は日常的なワークフローの中でターゲットシナリオを実行し、早期にリグレッションやロジックエラーを発見できました。V&Vチームは同じ基盤を用いてカバレッジを評価し、シナリオの優先度を決定し、安全性能を継続的に監視しました。
シミュレーションを「開発後の活動」としてV&Vチーム専用にせず、開発全体で共有資産としたことで、後工程の高コストな不具合を削減し、AVスタックの品質を高め、スピードを向上させることができました。
実装と方法論
Shift-Leftアプローチは、以下のような技術的・組織的な変革によって可能となりました:
- ForetellixのシナリオベースシミュレーションツールをCI/CDに統合:すべてのコード変更後に自動的に仮想テストが実行され、早期に問題を検出
- シナリオライブラリを最適化:過去の不具合や実走行データに基づいて高価値シナリオを優先し分析効率の向上
- 並列シミュレーション実行を可能にする計算リソースへの投資:Foretellixのツールにより大規模かつ多様なテストを実現し、統計的に有意なパフォーマンス評価が可能
- ツールチェーンの相互運用性を確保:シミュレーション結果は一貫した形で開発チームに共有され、設計とテストをつなぐループを形成
最終的に約3,100万回のシミュレーション実行で87%のテストカバレッジを達成しました。
結果
- テストカバレッジ:6か月で12%から87%に拡大。希少でハイリスクなエッジケースまでカバー。
- 開発コスト:50%削減。物理テスト依存を減らすことで時間短縮とリソース効率化を実現。4年半かかるはずのプログラムが2年未満で完了。
- AVスタック品質:早期に統合問題や予期せぬ挙動を特定。後工程での不具合を減らし、システムの安定性を向上。
主な学びと考察
- 低コストで広範囲を検証可能な、物理テストを置き換えるものではなく補完するシミュレーションの活用で、物理テストは本当に必要な安全クリティカルな場面に集中
- 高価値シナリオに集中することで、テストの関連性を高め、分析負荷の削減を達成
- CI/CDへの統合により開発者自身が検証を担えるようになり、デバッグが迅速化
- ツールチェーンの相互運用性と自動化により、テストが再現可能かつスケーラブルになり、開発サイクルに組込まれた
結論
シミュレーション主導の開発は効率性だけでなく、安全で信頼性の高いシステムを少ないリソースで構築するための基盤です。レベル4自動運転を目指す企業にとって、早期かつ継続的な検証は必須条件となります。
Foretellixはその移行を支援します。高レベルの自動運転スタック開発に取り組んでいる方は、ぜひデモにお申し込みください。
 (6)")
 (3)")