AI搭載自動運転スタックにおけるエンドツーエンドの計画モデルを学習させるためには、現実的で信頼性の高い走行データが不可欠です。しかし、実走行データには多様性やスケールの面で限界があります。この課題に対する有効な解決策は、スケーラブルかつ制御可能なシンセティックデータを生成することです。
本ブログでは、Foretellixの開発ツールチェーン「Foretify」と、CARLAおよびNVIDIA Cosmosとの統合環境を用いて、「優先通行妨害」シナリオを高品質に作成・選定・実行し、シンセティックセンサーデータを生成するプロセスを紹介します。生成されたデータは、AI搭載自動運転システムの模倣学習パイプラインに活用され、より多様で意図を保持したスケーラブルなトレーニングが可能となり、スタック性能と安全性の向上に寄与します。
背景:重要なデータギャップへの対応
本プロセスは、自動運転スタックの検証フェーズで発見された性能ギャップに端を発します。具体的には「優先通行を無視する車両が交差点を通過する」というシナリオにおいて、スタックが適切に対処できないことが判明しました。
エンジニアによる解析の結果:
- 実走行ログにはこのようなシナリオの事例が十分に含まれておらず、特にEGO(自車)が適切に対応したケースが不足
- 安全性に関わる重要シナリオであるにもかかわらず、既存データだけでは学習・評価が困難
この課題に対処するため、意図を保持しつつ再現性のある違反パターンを網羅したシンセティックデータ生成プロセスを構築しました。

1. 要件分析
まず、「優先通行妨害」シナリオに関する自然言語での要件定義ドキュメントを作成しました。このドキュメントには以下が含まれます:
- シナリオの機能的目的
- EGO車両の期待される挙動(減速、停止、回避など)
- 違反車両の行動(停止/徐行無視など)
我々はこれらの記述を元に、主要なシナリオ意図、アクターの役割と挙動、望ましい結果を抽出し、形式的なシナリオモデリングの基礎としました。
2. Foretify DeveloperおよびV-Suiteライブラリを用いた抽象シナリオ実装
OpenSCENARIO DSLを用いて、英語の要件をマップ非依存の形式的な記述に変換しました:
- エージェントの役割定義(例:「違反車両」「被害車両」「その他の車両」)
- 時間的関係や制約(例:「違反車両がEGOの0.5秒前に交差点進入」)
- EGOの期待される反応(例:「衝突時間が閾値以下の場合はXの減速度でブレーキを適用」)
Foretify V-Suitesライブラリに含まれる交差点シナリオをベースに、「優先通行妨害」への拡張・組み合わせを行いました。この再利用により、開発の迅速化と整合性の確保が可能となりました。
また、物理的・法的整合性を確保するために、以下を含むドメインモデル制約を適用しました:
- 交通ルールや道路構造、アクター能力に基づく制約
- 任意のマップ上でも妥当かつ現実的なシナリオ生成を保証
さらに、Foretify Developerの可制御ドライバーモデルを用い、「正しく振る舞うEGO車両」と「交差点ルールを無視する違反車両」の構成により、シナリオの忠実度と表現力を高めました。
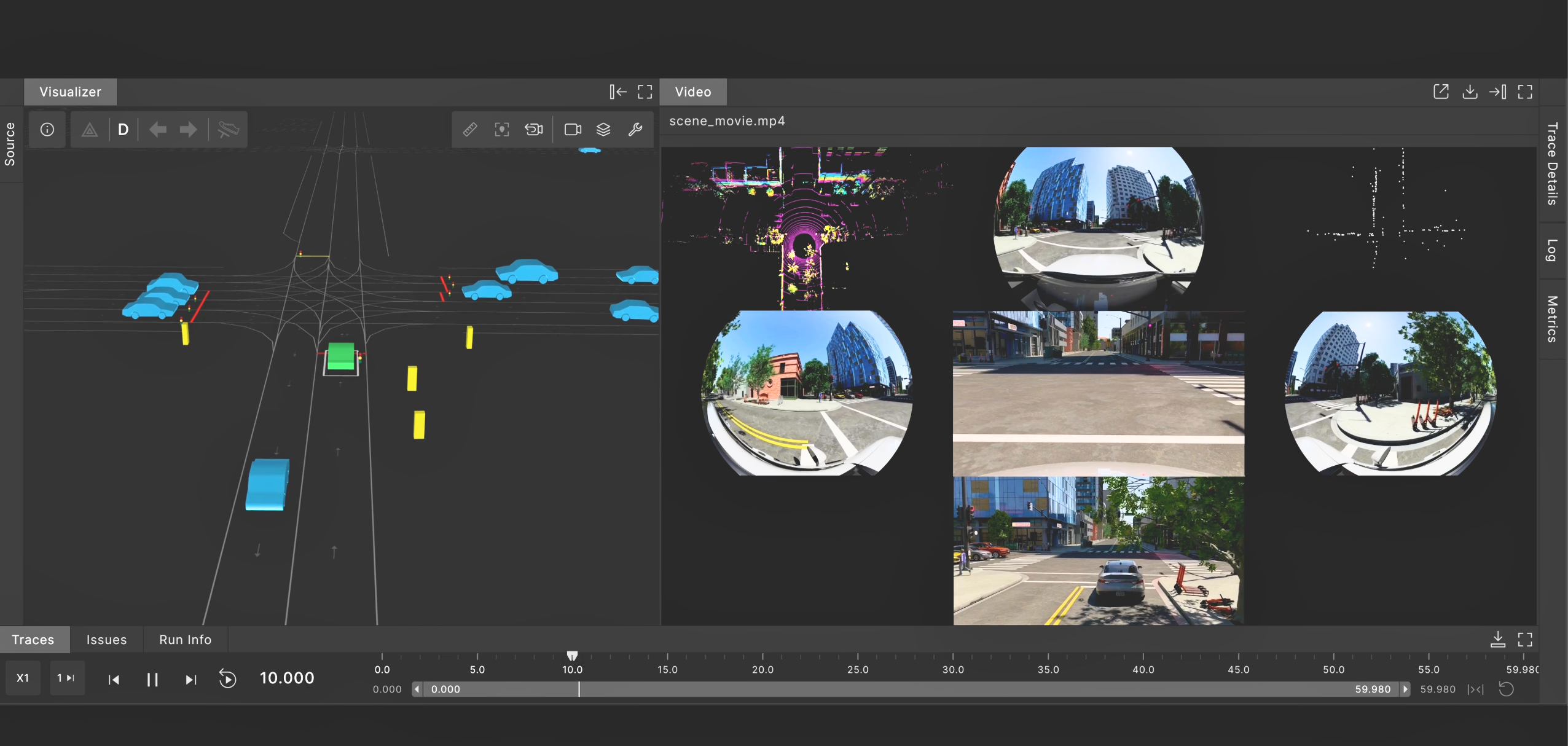
3. CARLAとForetifyによる実行環境構築
シナリオの実行は、CARLAシミュレータとのコシミュレーション環境で行われました。構成は以下の通りです:
- Foretifyが実行のオーケストレーションを担当
- CARLAが車両ダイナミクスや慣性、道路グリップを再現
これにより、意図を保持しつつ、現実の物理挙動を備えた高忠実度なセンサーデータが得られます。
4. 制約ソルバーを活用した大規模生成
Foretellixの制約ソルバー技術を用い、6000以上のバリエーションシナリオを生成:
- 違反車両は常に優先通行を妨害
- EGOは毎回、時間的プレッシャー下での判断を強いられる
- 他の交通状況、交差点レイアウト、タイミングなどはランダム化
これにより、多様性と意図整合性の両立が実現されました。
5. 多様性分析と学習用シナリオ選定
Foretellixの大規模データ分析基盤を用い、以下の分析を実施:
- 違反車両の速度やEGOの反応時間、衝突発生率の分布
- エッジケースやコーナーケースの網羅性評価
- 模倣学習に最適な代表的・多様なシナリオを選定
これにより、過学習を防ぎながら汎化性能を高めるシナリオセットを構築しました。
6. NVIDIA Cosmosによるセンサーデータ生成
選定されたシナリオは、Cosmos Transfer(マルチコントロールWFM)を通じて、物理ベースかつ超リアルなセンサーデータへ変換されました。さらに以下のような条件に応じたバリエーション拡張も行いました:
- 気象(霧、雨、まぶしさ)
- 地理的条件(都市部、郊外、高速道路ランプ)
- 光条件(夕暮れ、夜間、早朝)
このように、Foretify開発ツールチェーンを活用することで、スケーラブルかつ制御可能な形で、AI搭載自動運転スタックの学習に不可欠な高忠実度「優先通行違反」シナリオを生成することに成功しました。

