Safety, together with its Verification and Validation, is the largest unsolved problem in autonomous driving. Safety is also simultaneously a purpose, blocker, enabler, and expected consequence of autonomous driving. Solving it requires radical innovations exceeding those enabling core autonomy capabilities like Perception, Prediction, and Planning. This is because truly effective Safety solutions address not only technology but also mindset, development methodology, and culture. Foretellix is leading the charge, which makes it tremendously exciting to be here.
I have been building autonomous driving systems for over ten years. During that period, I have transitioned from an academic and technical expert to leading AV Architecture, Integration, and Systems/Safety Engineering and V&V organizations for some of the biggest and most advanced players in the game. I am intimately familiar with the Safety/V&V challenges and shapes of good solutions.
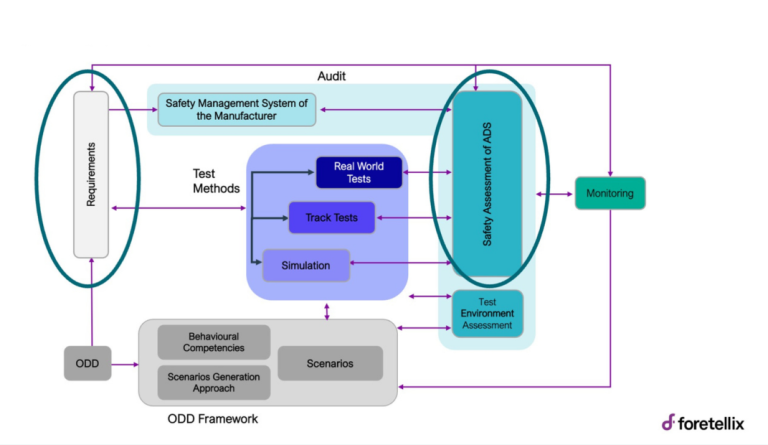
Safety Verification & Validation (V&V) probably has the greatest, critically unaddressed scope for technical, methodological, analytical, and tool innovation. These innovations need to go beyond addressing mere technical challenges. They should also naturally break down silos and strengthen the collaboration among the Autonomy development, Verification & Validation, and Systems/Safety activities of the organization through shared artifacts, targets, and workflows. Indeed, with the right enabling tools and workflows, the TICK of development can be matched with the TOCK of V&V. With each TICK-TOCK, autonomy development is harmoniously accompanied by credible maturity in Safety. Edge cases get elicited and understood sooner, there is continuous feedback on where the autonomy is improving and regressing, critical performance and safety indicators get tracked and translated into measures for residual risk, and the safety-case frameworks get updated with numbers and evidence artifacts. All on a per-release, or even a per-sprint cadence.
Making impactful innovations and synthesizing them together into an end-to-end Safety V&V narrative requires a few vital ingredients: A determined focus (including adequate, undiluted resources), continuously accumulating exposure to nominal and edge cases across a variety of Operational Design Domains (ODDs) and autonomy levels, and the raw technical prowess and experience needed to design and implement analysis, optimization, test case generation, and big data tools.
Those vital ingredients are exactly where Foretellix shines. Since 2018, the company has devoted absolute focus to safety and coverage-driven verification and validation of autonomous driving. We have ongoing engagements with some of the most respected OEMs and Tier1s as well as emerging technology providers and AV companies in on-road and off-road ODDs spanning AV & ADAS use cases. These engagements produce a wealth of insights and experiences in characterizing frequent as well as rare situations. The company is also a powerhouse of talent in the verification and tooling space, having delivered proven and enduring success in hardware verification. Also important for me, personally, are Foretellix’s contributions to, promotion, and adoption of open industry standards like ASAM OpenSCENARIO® 2.0.0.
Come and partner with Foretellix to gain unprecedented insights into Safety V&V while you engineer the best AV stack for your mission.
About Sagar Behere
Mr. Behere has over a decade of experience developing autonomous driving systems as an Architect, Integrator, and leader in Systems/Safety Engineering and Validation. Prior to Foretellix, Sagar held critical leadership positions at Aurora, Toyota Research Institute, and Zoox. He has also worked on Safety and Automated Driving research together with OEMs like Volvo Car Corporation and Scania. Sagar holds a Ph.D. in architecture for autonomous driving from KTH, The Royal Institute of Technology in Stockholm, Sweden.