The autonomous vehicle industry is undergoing a transition from high-definition maps toward real-time perception-based navigation. This shift raises a critical challenge for development teams: their simulation and validation tools still require detailed maps that are becoming increasingly costly and impractical to maintain. This article explores how automated map construction from vehicle perception data offers a solution, enabling AV teams to generate high-quality maps directly from drive logs without the overhead of traditional HD mapping operations. By leveraging the same perception data that enables map-free driving, this approach promises to bridge the gap between operational autonomy and development infrastructure needs.
Not so long ago, autonomous driving applications commonly relied on high-definition (HD) maps for guidance. Such maps were sometimes shared by a fleet of AVs and were updated on the fly as vehicles in the fleet shared data acquired while driving.
At present, the AV industry is moving away from HD maps. Instead, AV sensors and the perception pipeline produce a detailed representation of the AV surroundings, often including the road’s drivable area, lane lines, lane markings, traffic signs and so on. This temporary map is created repeatedly as the vehicle drives. Importantly, this approach doesn’t depend on a real-time communication network, a fleet or a remote server.
Multiple factors contribute to this trend:
- AV sensors and perception algorithms have improved sufficiently to reliably produce such temporary local maps
- Creating, maintaining and sharing HD maps became a costly ongoing operation. Scaling HD map creation as AV deployment expands to ever-larger geographies has become economically unsustainable.
- Fusing together map information and perception data is challenging, especially for end-to-end ML stacks
While AVs seem to operate well without HD maps, the development environment still depends on maps. Simulators require a map, and so do many monitoring, search and evaluation utilities used for validation. To address these needs, AV development teams continue to produce maps of regions where test drives take place, but this costly and time consuming operation is tapering down.
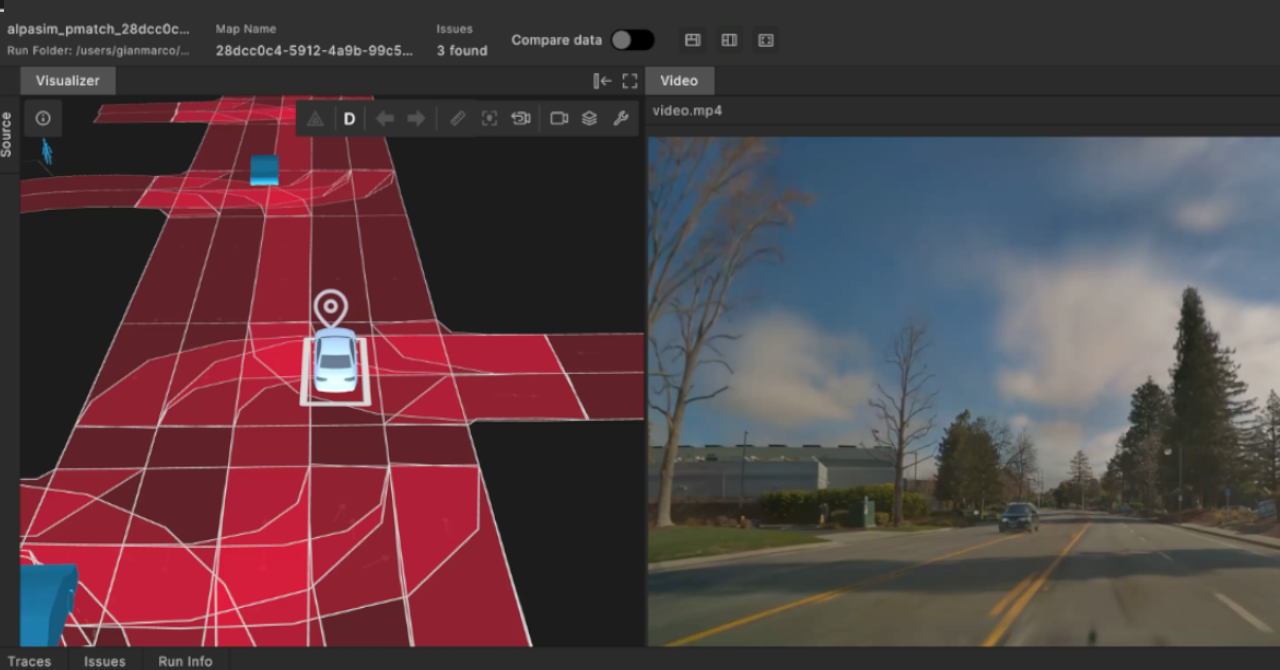
The absence of detailed maps poses a challenge for development and validation teams. Since maps are required, why not create detailed-enough maps automatically? Presumably, if the data collected by an AV is good enough to drive by, it should be sufficient to produce a detailed map of the AV’s route. Foretellix developed a technology to do just that.
The input to our mapping pipeline is a recorded drive log. Rather than the full recording of all sensor channels and AV stack signaling, the log captures more abstract details produced by the perception pipeline. These may include:
- The AV global position
- Drivable area boundaries, road and lane markings
- Road signs, traffic lights, on road markings such as stop lines and arrows
- Additional road attributes as available. Some examples include:
- Lane use – bike lanes, public traffic lanes, sidewalks and such
- Road surface: asphalt, concrete, gravel for instance
- Access restrictions, for example toll-roads, private roads
The above information is captured every cycle of the AV stack, typically every 20-100 milliseconds. In principle, integrating this information over time will produce a detailed map of the AV’s route. Unfortunately there are various issues that need to be addressed before a usable map can be produced.
Input data quality varies, and is not always accurate or even usable. Several factors influence the log data quality:
- Sensor noise, inaccuracy or interference (glare for example)
- Occlusion, causing parts of the scene to be missing from the log
- Poor or non-existent road marking and signage
- Perception errors, like recognizing a shadow across the road as a stop line
- Inconsistency between time frames, for example where a sign is recognized in some frames but not in others
The mapping pipeline uses several strategies to overcome data quality issues. First, since the data is integrated over time, each element in the scene is typically represented multiple times. For example a lane boundary line is present in most frames, though it may be missing in some. Interpolating over the series of occurrences will typically fill in the missing details.
Next, to address incomplete perception data, the system employs several compensation algorithms that leverage structural invariants and contextual assumptions. For instance, when lane markings are absent from a road segment, the algorithm analyzes adjacent sections to extract consistent road properties, such as lane count and width, then interpolates these characteristics across the unmarked area. Similarly, when a large vehicle creates prolonged occlusions that obscure lane boundaries, the mere presence of that vehicle provides sufficient evidence to infer the underlying lane presence, as vehicles typically follow established traffic patterns.

Data is only collected along the AV route. This is sufficient for some applications, but simulation may require a broader map, for example when experimenting with variations of the recorded scene. Foretellix’s Smart Replay capability can create many variations that may expand beyond the immediate vicinity of the AV, like adding cross traffic in a junction. This requires the crossroads to be present on the map. Simulating synthetic scenarios on the driven area also requires a map broader than what is produced by following a single trajectory.
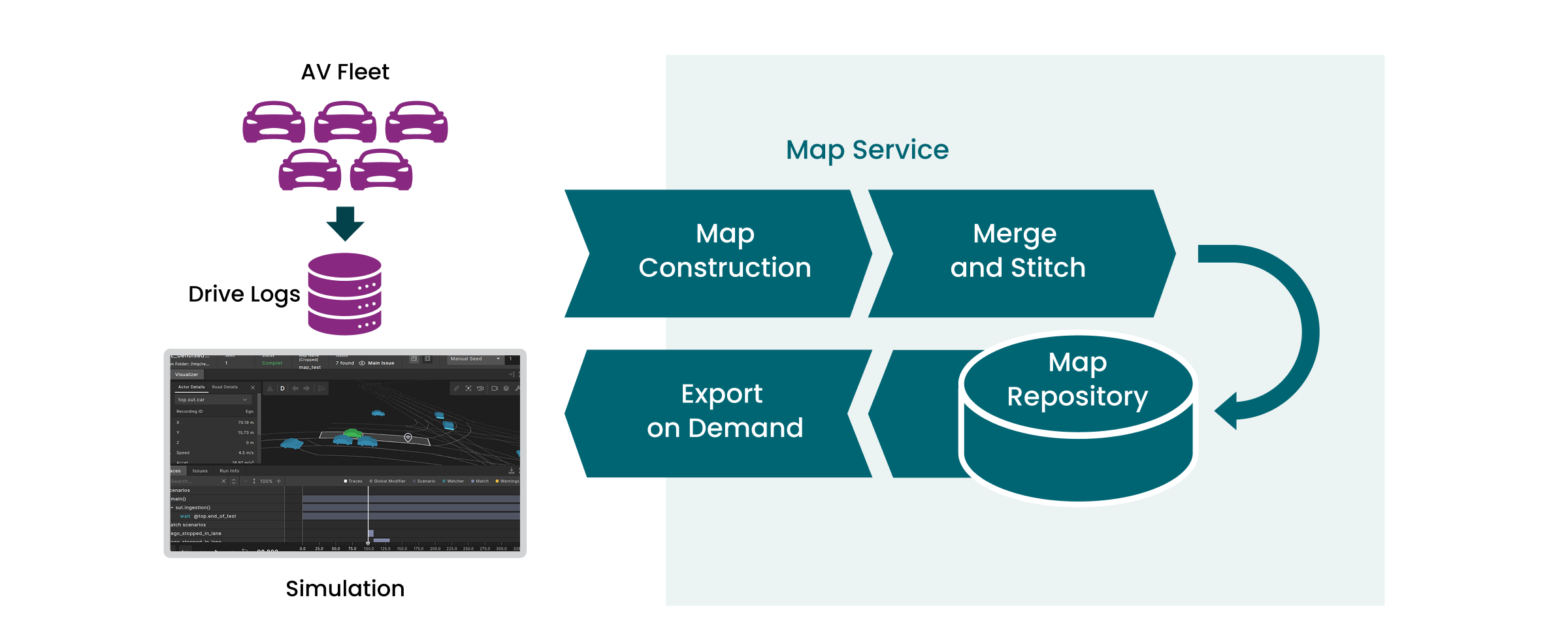
Fortunately, road testing of AVs is often performed by multiple vehicles driving around in a specific area. Over time, much of that area is covered. The mapping pipeline accumulates the maps created by each individual drive and merges them. This has several advantages:
Improved map quality: Overlapping drives reinforce the interpretation of road data, where imperfections in one drive are compensated by other drives. The merged map is therefore more complete and reliable than any of the individually produced maps.
Producing a complete area map: Stitching maps together creates a unified map of the drive area. That map can be used in full, or clipped to a specific region-of-interest (ROI) on demand.
To conclude, the dependence of AV development tools on detailed maps is becoming a challenge as these maps are no longer being produced and used for AV driving and the Operational Design Domain (ODD) is increasing past the areas that they do have maps for. As the industry transitions to this new way of development, a technology for creating maps from incomplete AV drive logs is vital. The result is a high quality map of the drive area usable for all evaluation, verification and validation needs.
If your AV team’s development process is being challenged by the lack of maps, and you’re interested in learning more or sharing your thoughts, then please contact us to stay in the loop.