Short on time? Below is a podcast summary of this blog, generated by Google NotebookLM.
Many of today’s most advanced vehicles proudly display their 5-star NCAP safety ratings, and for good reason. These standardized tests have driven major safety improvements across the industry, offering a reliable benchmark for features like Advanced Emergency Braking (AEB) and Crash Avoidance.
But passing NCAP doesn’t always mean a system is ready for the real world. Slight deviations in pedestrian appearance, road layout, or vehicle speed can cause even 5-star-rated systems to miss, delay, or fail to respond.
This discrepancy highlights a growing need: ensuring that ADAS functions perform not just in controlled conditions, but across the variability and unpredictability of actual roads. Bridging that gap requires rethinking how we define, execute, and scale scenario testing.
The Limits of NCAP’s Concrete Scenarios
NCAP (New Car Assessment Program) protocols are designed to evaluate how well a vehicle performs in a tightly defined set of safety-critical scenarios. These tests are extremely specific: fixed layouts, precise vehicle speeds (e.g., 10, 15, or 20 kph), limited target types (adult pedestrian, bicycle, motorcycle), and predetermined trajectories. While this standardization supports repeatability and scoring, it does not reflect the variability of the real world.
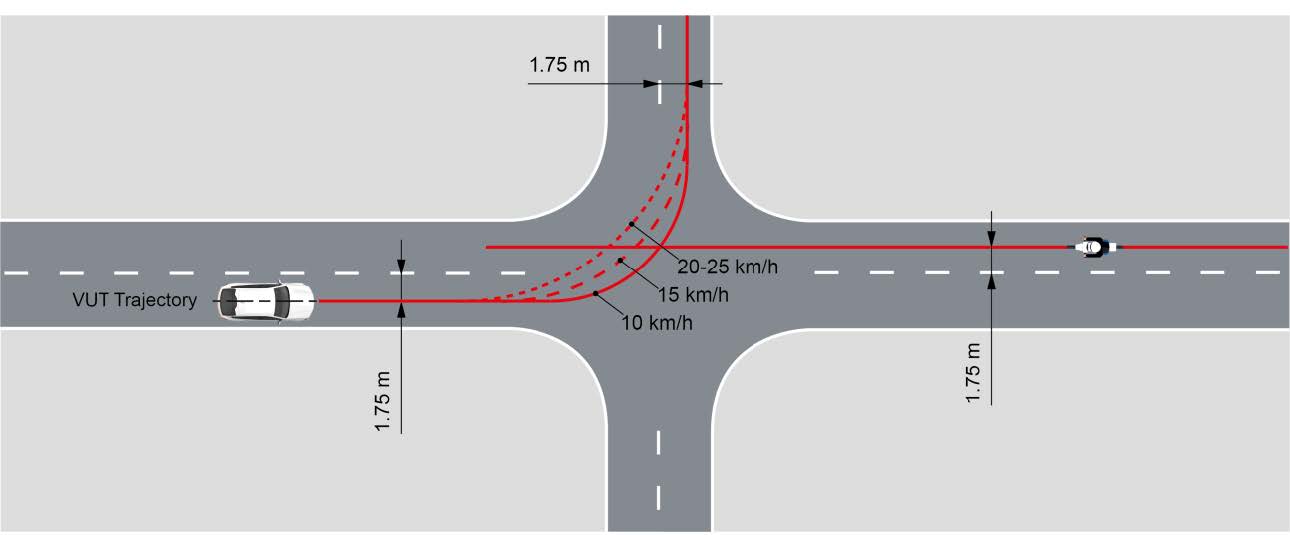
As noted in ISO 34505, “From a mathematical perspective the probability of a concrete scenario (concrete values of continuous parameters) is zero”, in other words: the probability that any one NCAP scenario will occur exactly as defined is essentially zero. Junction angles vary. Pedestrians don’t always walk straight. Vehicles arrive at different speeds and lateral positions. Even a small deviation can trigger a different outcome, including total system failure.
We’ve seen this in practice in the tests performed by Luminar Technologies at the CES conference in Las Vegas in 2022 and 2023. A range of 5-star Euro NCAP vehicles, including models from Tesla, BMW, Audi, Mercedes, and Lexus, were tested in scenarios that deviated slightly from the NCAP spec. Sometimes the pedestrian was a child instead of an adult, or crossed at a slight angle instead of straight on. In many of these cases, the vehicle didn’t brake at all or braked too late to prevent a serious impact.
And yet, most OEMs still optimize their ADAS systems to pass these tests alone. The risk here is overfitting: vehicles perform well in NCAP but fail in near-identical situations not explicitly covered by the protocol.
Foretellix Helps Teams Go Further with Abstract Scenarios
To achieve real-world ADAS safety, not just compliance, developers need to go beyond NCAP’s constrained test space. Foretellix’s scenario-based approach enables teams to do both: execute official NCAP test cases and collect KPIs and coverage metrics during those runs, and go further with large-scale, abstract testing to capture real-world variability.
For example, rather than testing a left-turn-across-path (LTAP) scenario at just three ego speeds and three oncoming speeds (as NCAP prescribes), Foretellix can generate and execute hundreds of tests across randomized speeds, angles, actor types, and arrival timings without needing to manually script each case. If a system performs consistently across this abstract scenario space, teams gain confidence not just in its ability to pass NCAP, but to handle reality.
This approach also ensures that developers don’t fall into the trap of false positives or missed edge cases that may appear only in low-frequency conditions.
Example: Lane Support System With Oncoming Vehicle
Here’s what that looks like in practice, using a Lane Support System (LSS) scenario with an oncoming vehicle:
NCAP defines very specific parameters for an Emergency Lane Keeping oncoming vehicle scenario:
- Road curvature: 0 (straight)
- Global Vehicle Target (GVT or aka oncoming vehicle) lane offset: 1.5 m
- Collision overlap: 10% of the ego vehicle’s front bumper
- Swerve side: Left (driver’s side)
- Lateral speed values tested: 0.2, 0.3, 0.4, 0.5, 0.6 m/s
These fixed parameters are used to verify Lane Support System (LSS) response under very specific conditions. But real roads aren’t that predictable.
Foretellix abstract testing lets you define parameters that are both broader and more realistic. The list below shows one example set that would be valuable to test:
- Vehicle Under Test (VUT) speed is varied across [50–130] kph
- GVT oncoming vehicle with speed across [50–130] kph
- GVT offset ranges from 0 to 3 meters
- Swerve timing ranges from 5 to 20 seconds before potential impact
- Swerve amplitude ranges from 1 to 1.5 meters
- Simulations are run across a wide range of road curvatures and map geometries
This kind of coverage-driven, insight-rich workflow helps teams catch issues early, improve performance robustness, and make data-backed safety claims with confidence, enabling:
- Running hundreds of automatically generated abstract scenarios
- Automatically filtering runs based on outcomes, e.g., largest lane-border exceedance
- Analyzing aggregated metrics like:
- Lateral acceleration
- Minimum distance to target
- Lateral deviation at key timepoints
- Quickly identifying fragile behaviors or regressions that wouldn’t show up in standard NCAP testing
One Platform, Multiple Validation Modes
Foretellix’s toolchain supports validation across the full range of test types: abstract, concrete, and real-world.
Foretify Evaluate helps teams measure where they are in the development and testing process. It enables coverage analysis, triage, and KPI tracking across both abstract and concrete scenarios. Whether a test comes from a synthetic input, a real-world log, or a concrete NCAP replay, Foretify Evaluate applies the same metrics and analysis, helping teams understand what has been tested and what gaps remain.
Smart Replay, part of Foretify Generate, lets teams recreate exact NCAP tests or run slight variations on them. For example, teams can simulate the same concrete test with a vehicle 10 cm off the centerline or approaching 2 kph faster, conditions that might easily occur in reality but fall outside the rigid NCAP specs. This helps identify fragile behavior early and improves performance robustness.
In parallel, Foretellix’s abstract scenario technology can be used to automatically generate thousands of concrete test instances, systematically covering parameter ranges around the original NCAP setup. This makes it possible to validate both compliance and robustness using the same infrastructure.
Together, these tools allow OEMs and Tier 1s to layer abstract testing around concrete scenarios, improving their safety case without sacrificing compliance. And that approach isn’t just effective; it’s aligned with where regulation is heading.
Aligned with Where Regulation Is Heading
Euro NCAP 2026 marks a shift toward broader safety validation. The new protocols introduce a Robustness Layer that allows small variations in test parameters, such as slight speed or offset changes, and formally support simulation to validate these deviations when physical testing isn’t feasible.
Other standards, including UN DCAS proposals, are following suit. Regulators increasingly recognize that real-world safety depends on more than rigid track tests, requiring scalable, explainable, scenario-based validation.
Foretellix enables teams to meet today’s requirements while preparing for tomorrow’s expectations, providing the flexibility and coverage regulators are beginning to call for.
From Checkbox Compliance to Real-World Confidence
Today, many OEMs test for compliance and hope for generalization. But “hope” isn’t a safety strategy. As simulation credibility improves and regulatory expectations shift, the industry is moving toward coverage-based verification at scale.
Foretellix empowers this transition by giving ADAS teams the ability to validate broadly, measure meaningfully, and act confidently without duplicating effort or sacrificing transparency. This approach blends well with concrete NCAP tests on test tracks and testing in simulation using concrete and abstract scenarios. This hybrid approach lowers cost and speeds up the process of achieving NCAP compliance in the quest to improve real world safety.
Whether you’re preparing for NCAP, scaling real-world validation, or doing both in parallel, Foretellix helps you get there with a smarter, more scalable testing workflow. Contact us today to learn more.