Annual AutoTech Breakthrough Awards Program Recognizes Foretellix’s Innovations in Enabling Safe Autonomous Vehicles
SUNNYVALE, CA and TEL AVIV, Israel – October 16, 2025 – Foretellix, the leading enabler of safe autonomous vehicles, won the “Autonomous Vehicle Innovation of the Year Award” for its Foretify Physical AI toolchain in the sixth annual AutoTech Breakthrough Awards program. Foretify accelerates the training, validation and safety evaluation of autonomous vehicles, making AI safe for the physical world. The awards, conducted by AutoTech Breakthrough, recognize the top companies, technologies, and products transforming the global automotive and transportation technology markets.
The AutoTech Breakthrough Awards celebrate excellence across the rapidly evolving automotive technology landscape, spotlighting companies driving progress in areas such as autonomous driving, electrification, connected vehicles, and AI integration. Foretellix joins a group of leading industry innovators including BMW, Polestar, Zoox, and Helm.AI, whose solutions are redefining how the world moves safely and intelligently.
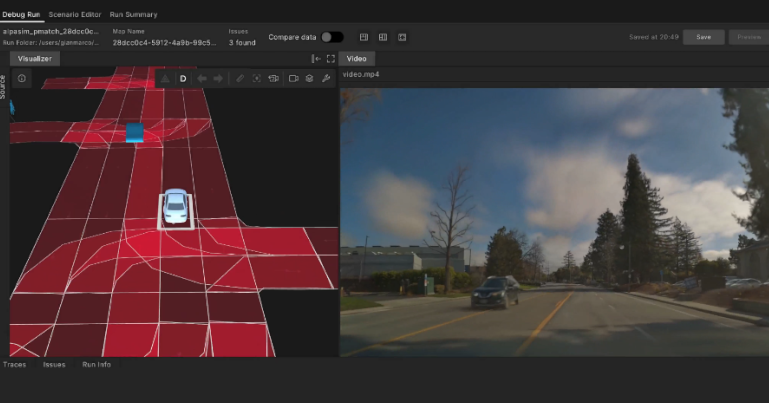
Foretify is Foretellix’s Physical AI toolchain that bridges real-world driving data and intelligent simulation to accelerate the safe development of autonomous vehicles. It transforms unstructured data into actionable insights, automatically identifying and prioritizing meaningful and safety-critical scenarios. Developers can then close identified gaps through intelligent scenario generation and targeted simulation, combining real and synthetic data for a measurable, efficient, and scalable validation process.
By focusing on high-value, safety-relevant Physical AI AV data and automating key validation steps, Foretellix helps developers optimize resources while achieving faster and more consistent results. This systematic, scenario-based approach is enabling OEMs and AV developers to shorten development cycles, improve safety outcomes, and accelerate their journey toward large-scale deployment of autonomous systems.
“This recognition further validates Foretellix’s award-winning Foretify Physical AI toolchain and its impact on the future of safe AI-powered autonomy,” said Roger Ordman, Vice President of Marketing at Foretellix. “Foretellix is continuing its mission to make Physical AI-driven autonomous vehicles safe for deployment in the real world, and this latest recognition reinforces our commitment to advancing the safety and reliability of intelligent mobility.”
“Foretify empowers developers to move from massive, unstructured datasets to targeted, high-value scenarios,” said Bryan Vaughn, Managing Director of AutoTech Breakthrough. “By unifying real-world and synthetic data and automating validation workflows, Foretellix is accelerating measurable progress toward safer and more reliable AI-powered autonomy. We’re pleased to honor Foretellix for its leadership and innovation in this critical area.”
About Foretellix
Foretellix is the leading enabler of safe autonomous vehicles. Its Foretify Physical AI toolchain accelerates the training, validation and safety evaluation of autonomous vehicles, making AI safe for the physical world. Foretellix empowers OEMs and AV developers to build next-generation AV technology with measurable safety, efficiency, and scale. With offices in the US, Europe, and Asia, Foretellix is driving the shift to intelligent, AI-powered autonomy.
For more information, visit www.foretellix.com.