The recent Cruise recall, which was initiated last week to address a “unique combination of parameters” provides us with a glimpse into the future of autonomous driving. Kudos to Cruise and CEO Kyle Vogt for their commitment to safety and for filing a voluntary recall with NHTSA. Currently, AV providers only deploy a few hundred AVs on public roads. This incident is just the tip of the iceberg – when tens of thousands of AVs are deployed, faults from unique combinations of parameters will be the norm – not an exception. A rigorous Safety-Driven Verification and Validation solution is required to enable large-scale safe deployment of AVs and prevent frequent accidents.
What happened?
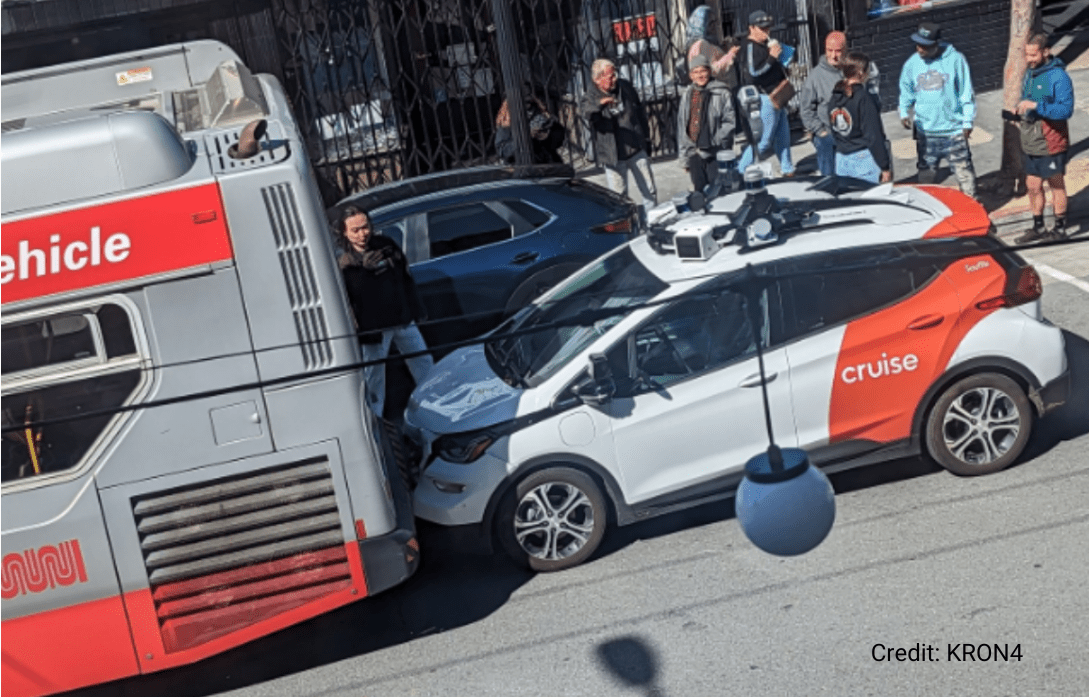
In a minor collision with a city bus in San Francisco, the Cruise AV approached an articulated bus whose front section pulled out into traffic and stopped. The AV predicted that the front section would keep moving and the rear section would follow. However, when the front section stopped, the rear section of the bus got rear-ended by the AV.
Kyle Vogt explained in his blog that the collision occurred due to a unique combination of specific parameters: the specific position of the vehicles when the AV approached the bus (with both sections of the bus visible initially and then only one section), the AV’s speed, and the timing of the bus’s deceleration (within only a few seconds of the front section becoming occluded).”
Facing the long tail
The Cruise incident provides us all a glimpse into the future of autonomy. AV providers must deal with the ‘long tail’ of faults before reaching large-scale commercial deployment. Many of these faults result from unique parameter combinations, which may seem rare today, but as more autonomous vehicles are deployed, the frequency of such unique occurrences will increase significantly.
Around two hundred Cruise AVs in San Francisco in driverless mode had accumulated about one million miles before this particular accident happened. When tens of thousands of AVs are deployed, such incidents (and many others) will happen much more frequently. Faults due to unique combinations of parameters will be the norm.
AV providers must ask themselves some tough questions, such as:
- Can we reproduce such situations in simulation?
- Are we able to test the software fix not just for this one specific combination but also for all its possible variations?
- How can we discover the next fault due to a unique parameter combination through internal testing rather than through costly, lengthy, and potentially unsafe driving on public roads?
- Do we have a test coverage model, and have we improved it based on learning from this incident?
- Do we have an automated testing system to explore and find such unknowns?
Rigorous Safety-Driven Verification and Validation is required
Autonomous vehicles are one of the most complex system of systems ever developed. They operate in the most complex environment with many unpredictable actors, and the cost of failure is enormous. A rigorous Verification and Validation (V&V) solution is required to address the almost infinite number of unique conditions an AV can face. The semiconductor industry faced a similar challenge in the past – validating complex chips with billions of transistors and a near-infinite number of operating conditions to discover all faults before the expensive production of silicon chips. This industry can mass-produce today billions of chips used in every part of modern life with no consequential faults by adopting the most rigorous Verification & Validation approach.
Foretellix’s Safety-Driven Verification and Validation (SDV) rigorous approach leverages from the semiconductor industry learning and is designed from the bottom up to enable AV providers to answer YES to the above tough questions. Foretellix enables the safe large-scale deployment of autonomous driving systems.